根據控制工程的理論,對于一個無刷直流電機控制系統來說,其穩定性、快速響應性和準確性是十分重要的一點,在軟件設計中保證系統的穩定性是軟件設計的應然內涵,系統相應的準確性是軟件設計的目標,影響速度是軟件設計之初所提出的期望。根據控制工程基本原理可知,想要保證一個控制系統的穩定性和準確性,精密可靠的算法必不可少,為了保證可以達到預期的設計目標,同時又要確保穩定性,在本設計中采用閉環PID算法來對無刷直流電機進行控制。
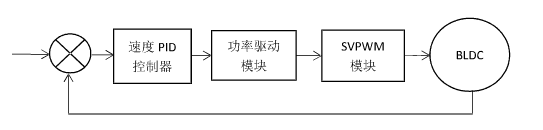
首先,整個無刷直流電機的閉環控制流程如圖,通過外部的可調設備對預先設定好的轉速值做出調整,再根據速度PID控制器獲取電機當前的實際轉速,實際轉速時通過STM32模塊發出的相鄰信號跳動的時間差計算得到,通過將系統需要的速度的參考值與實際的速度值相減,所得到的速度差值反饋到PID控制器之中,并由控制器相應的模塊將信號輸出,控制輸出信號將其視為正弦波信號,其幅值相同,同時也會生產SVPWM波,并作用于STM32控制芯片的PWM模塊,從而對無刷直流電機的速度進行管控。